LexyRobot
Arduino Robotic Arm with 2 degrees of freedom controled by MATLAB based on Arduino. Project deverloped with Chris Zachariah as part of the course ECE 5995 Introduction to Robotics at Wayne State with Dr Abhilash Pandya. Documentation available in the Repository Wiki Page
Folder Organization
-
matlab
- letters: Generated handwriting letters .mat files
- pen: Pen Script files
- lexyRobot.mat : Robot Class
- lexyRobotGUI.fig : Matlab GUI Figure file
- lexyRobotGUI.mat : Matlab GUI Script file
- testLexyRobot.mat : Matlab Script for testing
LexyRobot GUI
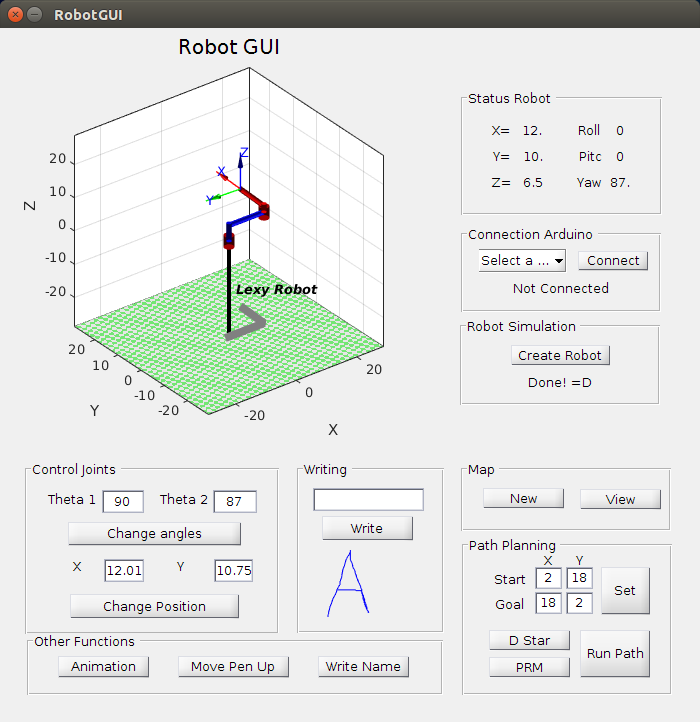
Features GUI
- Scan COM ports and perform Connection
- Inverse and Direct Kinematics
- Control trough angle and coordinates in cm
- Draw Words
- Path Planning (DStar and PRM)
Robot Image

Reference
- Software
- Matlab Robotic Toolbox Open Source Toolbox created by @petercorke
- ArduinoIO Arduino Legacy Support for Matlab
- Object Oriented Programing on Matlab Concepts used in the project
-
Pen Pen / Mouse draw input template modified for this project
- Related Videos
- Robotic Theory
- Project Results